Past Projects
Telesurgical Robotic Operative Network (TRON)
Share:
Updated: 8/07/2024
Project date: 01 OCT 2018 - 31 MAR 2023
Partners: SRI International, University of California Berkeley, University of California San Diego, University of Chicago
TRON Brief Overview:
Lay Abstract
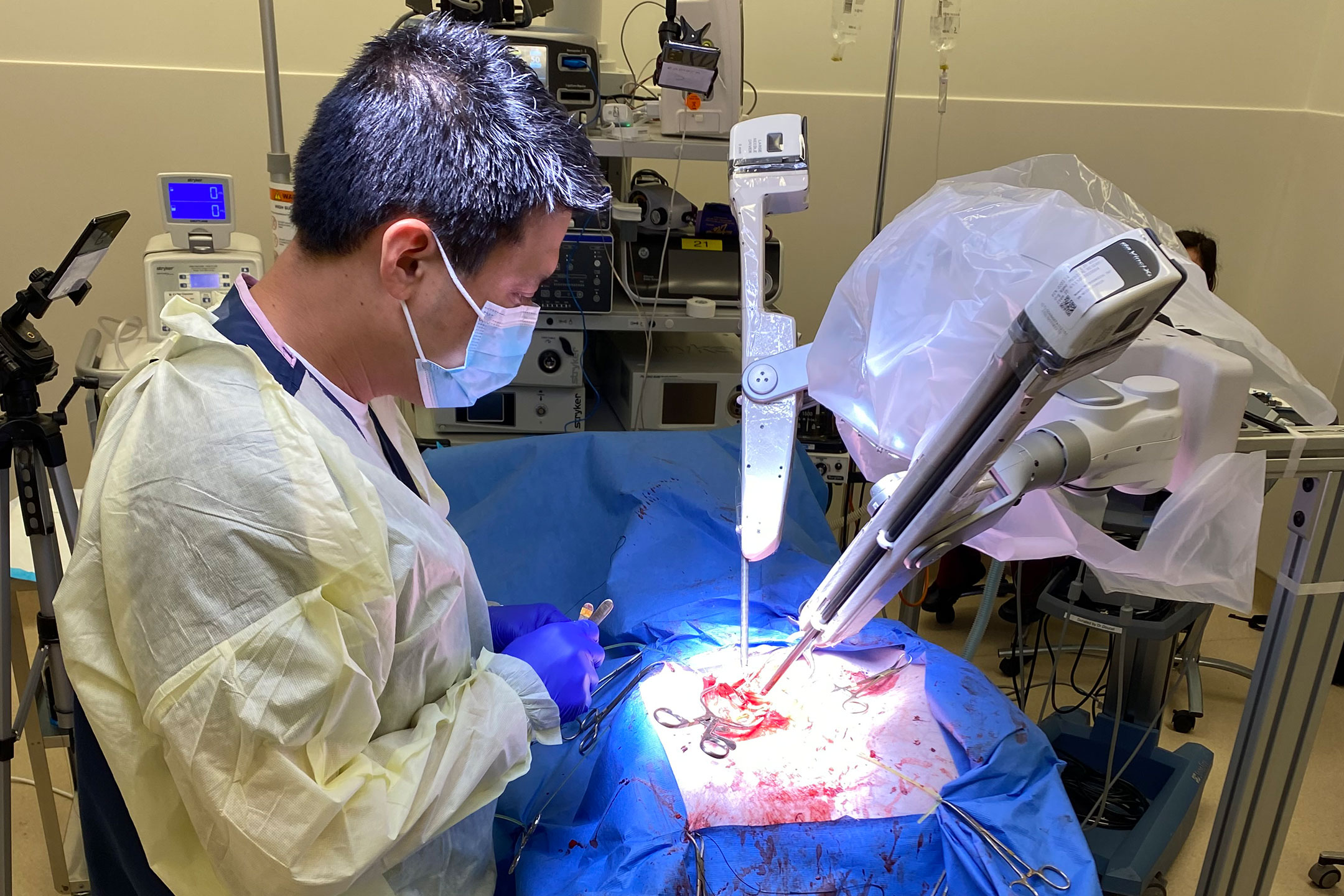
Life-threatening battlefield injuries often require medical skills beyond those that can be provided by a medic. Exsanguination due to incompressible hemorrhage is a common injury that is not addressable with today’s technology. Remotely operated surgical robots have long been considered for providing advanced surgical care far forward; however, the disruptions to digital communications on the battlefield have precluded the use of telesurgery beyond technical demonstrations in safe laboratory settings.
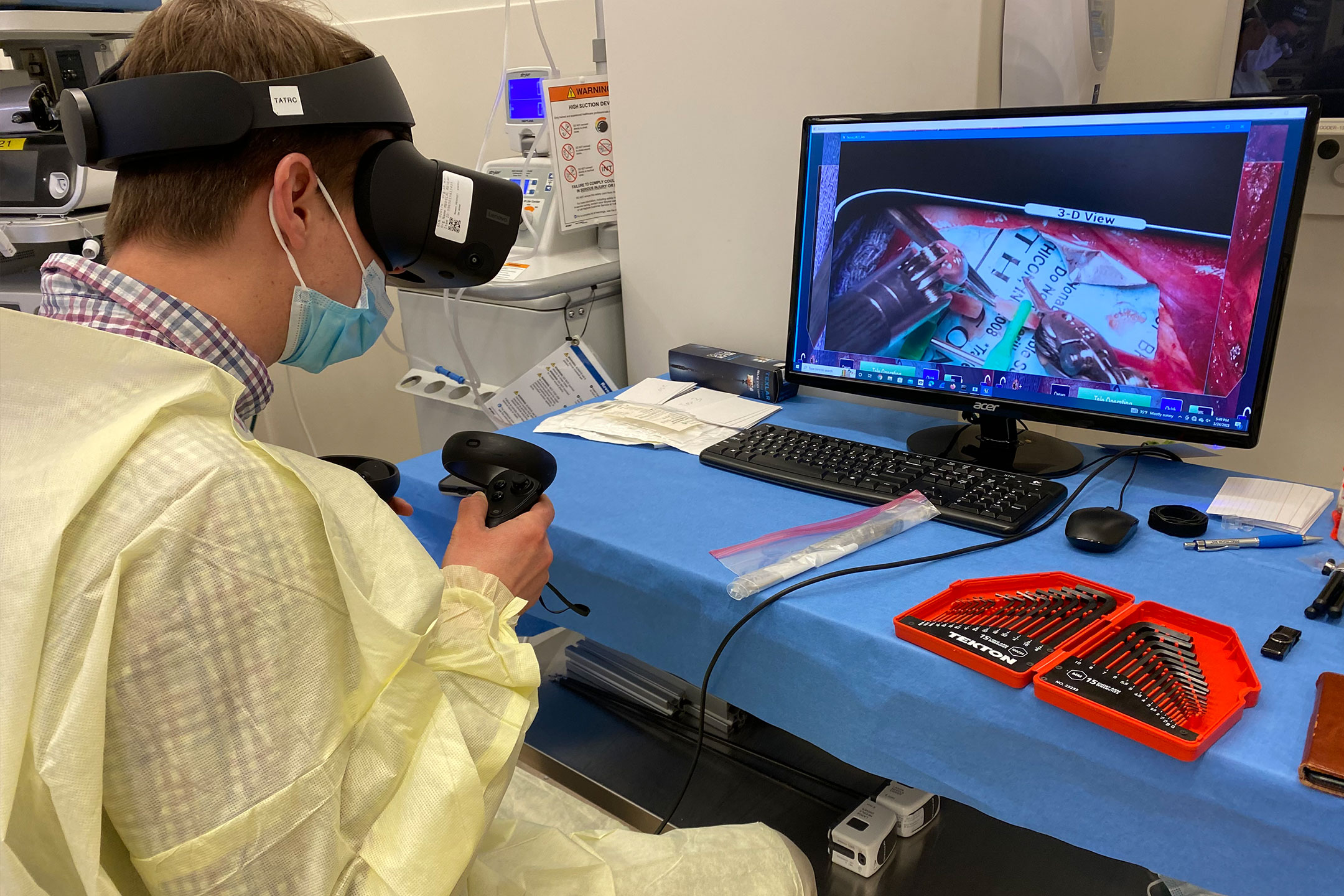
Limited communication bandwidth and relatively long transmission delays interfere with current approaches for direct control over the movements of the robot, based on a surgeon’s observation of 3D video of the patient. Applying machine learning and artificial intelligence to robot system control and allowing on-board systems to sense and adapt in real time to changes in the local environment while taking higher level direction from a distant surgeon promises to revolutionize battlefield medicine. A small, deployable robotic system could act as a force multiplier, enabling fewer surgeons to treat more casualties. Such a system could address surge demand, while enabling prolonged field care in a future multi-domain battlefield, where immediate evacuation of casualties may not be possible.
The focus of the proposed research is to develop and demonstrate the technology required to perform remote vascular repair under conditions of significant communication delays and reduced bandwidth. The techniques being considered for development will have applications across many domains where the judgement and experience of an expert is required, but direct tele-operation is infeasible. These scenarios include en route care, point-of-injury stabilization, and surgical assistance at a military Role-2 medical facility, which currently does not support surgical intervention beyond essential damage control.
Description on Quarterly Report
Objective: Identify and characterize the problems caused by signal latency in telesurgical robotics, and to investigate methods that effectively mitigate these problems to provide safe and effective robotic telesurgery. Our approach will focus on the design of semiautonomous robotic surgery protocols and application of machine learning to improve the performance and safety of complex robotic surgical tasks in the setting of time delay and signal disruption. Hypothesis: Semi-autonomous protocols and applied machine learning are effective counter-measures to improve the safety profile and efficacy of robotic telesurgery against excessive signal latency and signal disruptions. Research Aims: An investigative approach will be employed using multiple virtual simulations and a robotic manipulation platform configured for telesurgical purposes combining to demonstrate execution of life-saving surgical procedures and representative surgical tasks on clinical simulators and illustrate the same tasks on a proof-of-concept on animal models. Aim 1: Investigate the deleterious effects of signal latency on standardized and validated robotic surgical tasks in virtual simulation and real-time using a robotic tele-surgical platform Aim 2: Research and design optimal machine learning strategies and algorithms (supervised learning vs unsupervised learning vs reinforcement learning) for application to robotic surgical tasks and procedures. Aim 3: Research and design semi-autonomous robotic assistance protocols that can increase the efficiency, precision, and safety while maximizing surgeon-control under extensive signal latency and signal disruption. Aim 4: Engage with the signal community to research and identify approaches to increase medical network communications performance and to harden telerobotic surgery capabilities against Cyber-attack and EW threats.
Final Reports:
Final Report - Telesurgical Robotic Operative Network (TRON) - Final Version v4
DTIC Reports:
TRON Press Releases:
Briefings & Presentations:
TRON Videos:
TRON Photos:

Tags: | |